在PLC的世界里,我们主要处理三大类型的数据:开关量、模拟量和脉冲量。当你深入理解了这三者之间的关联,你就能游刃有余地掌握PLC的操作。
PLC编程算法(1)
1、 开关量,也被称为逻辑量,它仅有两个状态:0或1、ON或OFF。这两种状态反映了不同的工作状况,包括输入和输出状态。开关量控制是PLC的核心应用,通过它,我们可以根据当前的输入组合和历史的输入顺序,使PLC产生相应的输出,从而实现系统的有序工作。这种控制方式有时也被称为顺序控制,它可以根据需求进行手动、半自动或自动的调节。
2、 模拟量,是指那些连续变化的物理量,如电压、电流、压力、速度和流量等。虽然PLC原本主要用于开关量控制,但由于模拟量可以转换为数字量,PLC也能可靠地处理模拟量。在连续的生产过程中,模拟量控制常常被称为过程控制。要实现模拟量和数字量之间的转换,我们需要借助传感器将模拟量转换为电量,如果电量不是标准的,还需要通过变送器将其转换为标准的电信号,如4—20mA、1—5V、0—10V等。接着,通过模拟量输入单元(A/D)将这些标准电信号转换为数字信号,再由PLC进行处理。理解模拟量单元的分辨率和标准的电信号是进行这种转换的关键。

3、 脉冲量是一种特殊的数字量,其值在0(低电平)和1(高电平)之间不断交替变化。每秒钟脉冲交替变化的次数称为频率。在PLC中,脉冲量的控制主要用于位置控制、运动控制和轨迹控制等。例如,在角度控制中,我们可以通过计算所需的脉冲数来控制步进电机的旋转角度。如果步进电机驱动器的细分是每圈10000,并且需要电机旋转90度,那么所需的脉冲数就是10000除以(360/90),即2500个脉冲。
PLC编程算法(2)——模拟量的计算
1、 当电压范围为-10V至10V时,不同的分辨率会导致不同的十六进制转换。在6000分辨率下,该电压范围被转换为十六进制值F448至0BB8,对应数字范围为-3000至3000。而在12000分辨率下,电压范围被转换为E890至1770Hex,对应数字范围为-6000至6000。
2、 对于0V至10V的电压,12000分辨率下其十六进制转换范围为0至1770Hex,对应数字范围为0至6000。而同样在12000分辨率下,十六进制范围扩展为0至2EE0Hex,对应数字范围为0至12000。
3、 电流从0mA至20mA时,6000分辨率下其十六进制转换范围是0至1770Hex,对应数字范围为0至6000。在12000分辨率下,这个范围扩展为0至2EE0Hex,对应数字范围为0至12000。
4、 电流在4mA至20mA之间时,其十六进制转换与0mA至20mA时相同。在6000分辨率下为0至1770Hex,对应0至6000的数字范围;在12000分辨率下为0至2EE0Hex,对应0至12000的数字范围。
请注意,以上仅为简单介绍,不同的PLC具有不同的分辨率,并且所测量的物理量范围也可能不同,因此计算结果可能有所差异。
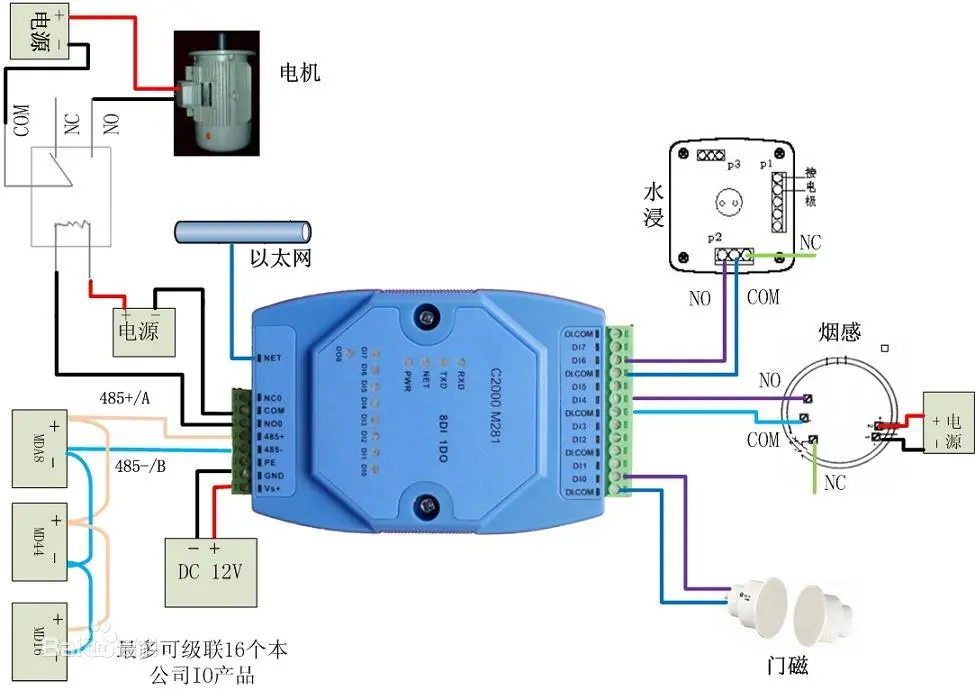
关于模拟输入的配线要求:
1、 推荐使用屏蔽双绞线进行连接,但请确保不连接屏蔽层。
2、 当某个输入不被使用时,建议将VIN和COM端子短接,以避免不必要的干扰。
3、 模拟信号线应与电源线(如AC电源线、高压线等)保持隔离,以减少电磁干扰。
4、 如果电源线上存在干扰,建议在输入部分和电源单元之间安装滤波器,以提高信号质量。
5、 在进行接线时,请确保连接正确。首先给CPU单元上电,然后再给负载上电,以确保系统的稳定运行。
6、 在断电时,建议先切断负载的电源,然后再切断CPU的电源,以避免可能的设备损坏或数据丢失。
PLC编程算法(3)——脉冲量的计算
脉冲量的控制是步进电机和伺服电机实现精确角度控制、距离控制和位置控制的关键。以下是以步进电机为例来说明各控制方式:
步进电机的角度控制:
步进电机的角度控制主要依赖于细分数和转一圈所需的总脉冲数。细分数决定了步进电机每一步转动的最小角度,而转一圈所需的总脉冲数则与步进电机的型号和细分数有关。
通过设定目标角度和计算角度百分比,我们可以确定需要发送的脉冲数。具体计算公式为:
角度动作脉冲数 = 一圈总脉冲数 × (设定角度 / 360°)
这个公式将目标角度转换为需要发送的脉冲数,从而实现精确的角度控制。
步进电机的距离控制:
步进电机的距离控制需要首先确定滚轮直径并计算滚轮周长。滚轮每转动一圈,步进电机就需要完成一定的脉冲数。因此,我们可以通过滚轮周长和每脉冲转动的距离来计算设定距离所需的脉冲数。
具体计算公式为:
设定距离脉冲数 = 设定距离 / [(滚轮直径 × 3.14) / 一圈总脉冲数]
这个公式将目标距离转换为需要发送的脉冲数,从而实现精确的距离控制。
步进电机的位置控制:
步进电机的位置控制实际上是角度控制和距离控制的综合。通过控制步进电机转动的角度和距离,我们可以实现对其位置的精确控制。在实际应用中,可能需要结合多种传感器和反馈机制来确保步进电机能够准确地到达指定位置。
对于伺服电机来说,其动作原理与步进电机类似,但需要考虑伺服电机的内部电子齿轮比和减速比。电子齿轮比决定了伺服电机接收到的脉冲数与实际转动角度之间的比例关系,而减速比则决定了伺服电机输出轴与电机内部转子之间的转速比。在进行伺服电机的控制时,需要根据这些参数进行相应的调整。







